




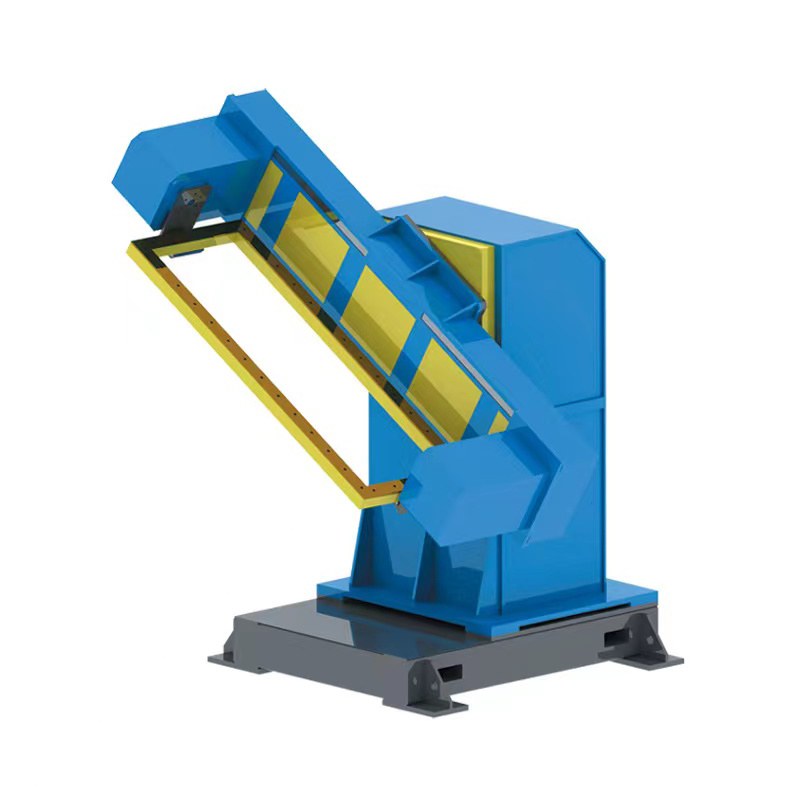
C/L/U ტიპის ორმაგი ღერძიანი სერვოპოზიციონერი
ტექნიკური პარამეტრები
| C-ტიპის ორღერძიანი სერვოპოზიციონერი | L-ტიპის ორღერძიანი სერვოპოზიციონერი | U-ტიპის ორღერძიანი სერვოპოზიციონერი | |||||||||||
| სერიული ნომერი | პროექტები | პარამეტრი | პარამეტრი | პარამეტრი | შენიშვნები | პარამეტრი | პარამეტრი | პარამეტრი | შენიშვნები | პარამეტრი | პარამეტრი | პარამეტრი | შენიშვნები |
| 1 | ნომინალური დატვირთვა | 200 კგ |
500 კგ | 1000 კგ | მეორე ღერძის R400 მმ/R400 მმ/R600 მმ რადიუსში | 500 კგ | 1000 კგ | 2000 კგ | მეორე ღერძის R400 მმ/R600 მმ/R800 მმ რადიუსში | 1000 კგ | 3000 კგ | 5000 კგ | მეორე ღერძის R600 მმ/R1500 მმ/R2000 მმ რადიუსში |
| 2 | ბრუნვის სტანდარტული რადიუსი | R400 მმ | R400 მმ | R600 მმ |
| R400 მმ | R600 მმ | R800 მმ |
| R600 მმ | R1500 მმ | R2000 მმ |
|
| 3 | პირველი ღერძის გადაბრუნების კუთხე | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | მეორე ღერძის ბრუნვის კუთხე | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | პირველი ღერძის ნომინალური აღმავალი სიჩქარე | 50°/S | 50°/S | 15°/S |
| 50°/S | 50°/S | 17°/სამხრეთი |
| 17°/სამხრეთი | 17°/სამხრეთი | 17°/სამხრეთი |
|
| 6 | მეორე ღერძის ნომინალური ბრუნვის სიჩქარე | 70°/S | 70°/S | 70°/S |
| 70°/S | 70°/S | 17°/სამხრეთი |
| 24°/S | 17°/სამხრეთი | 24°/S |
|
| 7 | განმეორებითი პოზიციონირების სიზუსტე | ±0.10 მმ | ±0.15 მმ | ±0.20 მმ |
| ±0.10 მმ | ±0.10 მმ | 17°/სამხრეთი |
| ±0.15 მმ | ±0.20 მმ | ±0.25 მმ |
|
| 8 | გადაადგილების ჩარჩოს სასაზღვრო განზომილება (სიგრძე × სიგანე × სიმაღლე) | 1200 მმ × 600 მმ × 70 მმ | 1600 მმ × 800 მმ × 90 მმ | 2000 მმ × 1200 მმ × 90 მმ |
| - | - | - |
| - | - | - |
|
| 9 | პოზიციის გადამრთველის საერთო ზომები (სიგრძე × სიგანე × სიმაღლე) | 2000 მმ × 1100 მმ × 1700 მმ | 2300 მმ × 1200 მმ × 1900 მმ | 2700 მმ × 1500 მმ × 2200 მმ |
| 1500 მმ × 500 მმ × 850 მმ | 2000 მმ × 750 მმ × 1200 მმ | 2400 მმ × 900 მმ × 1600 მმ |
| 4200 მმ × 700 მმ × 1800 მმ | 5500 მმ × 900 მმ × 2200 მმ | 6500 მმ × 1200 მმ × 2600 მმ |
|
| 10 | სტანდარტული ორღერძიანი მბრუნავი ფირფიტა | - | - | - | - | Φ800 მმ | Φ1200 მმ | Φ1500 მმ |
| Φ1500 მმ | Φ1800 მმ | Φ2000 მმ |
|
| 11 | პირველი ღერძის ბრუნვის ცენტრალური სიმაღლე
| 1200 მმ | 1350 მმ | 1600 მმ |
| 550 მმ | 800 მმ | 1000 მმ |
| 1500 მმ | 1750 მმ | 2200 მმ |
|
| 12 | ელექტროენერგიის მიწოდების პირობები | სამფაზიანი 200V ± 10% 50HZ | სამფაზიანი 200V ± 10% 50HZ | სამფაზიანი 200V ± 10% 50HZ | იზოლაციის ტრანსფორმატორით | სამფაზიანი 200V ± 10% 50HZ | სამფაზიანი 200V ± 10% 50HZ | სამფაზიანი 200V ± 10% 50HZ | იზოლაციის ტრანსფორმატორით | სამფაზიანი 200V ± 10% 50HZ | სამფაზიანი 200V ± 10% 50HZ | სამფაზიანი 200V ± 10% 50HZ | იზოლაციის ტრანსფორმატორით |
| 13 | იზოლაციის კლასი | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | აღჭურვილობის წმინდა წონა | დაახლოებით 800 კგ | დაახლოებით 1300 კგ | დაახლოებით 2000 კგ |
| დაახლოებით 900 კგ | დაახლოებით 1600 კგ | დაახლოებით 2500 კგ |
| დაახლოებით 2200 კგ | დაახლოებით 4000 კგ | დაახლოებით 6000 კგ | |
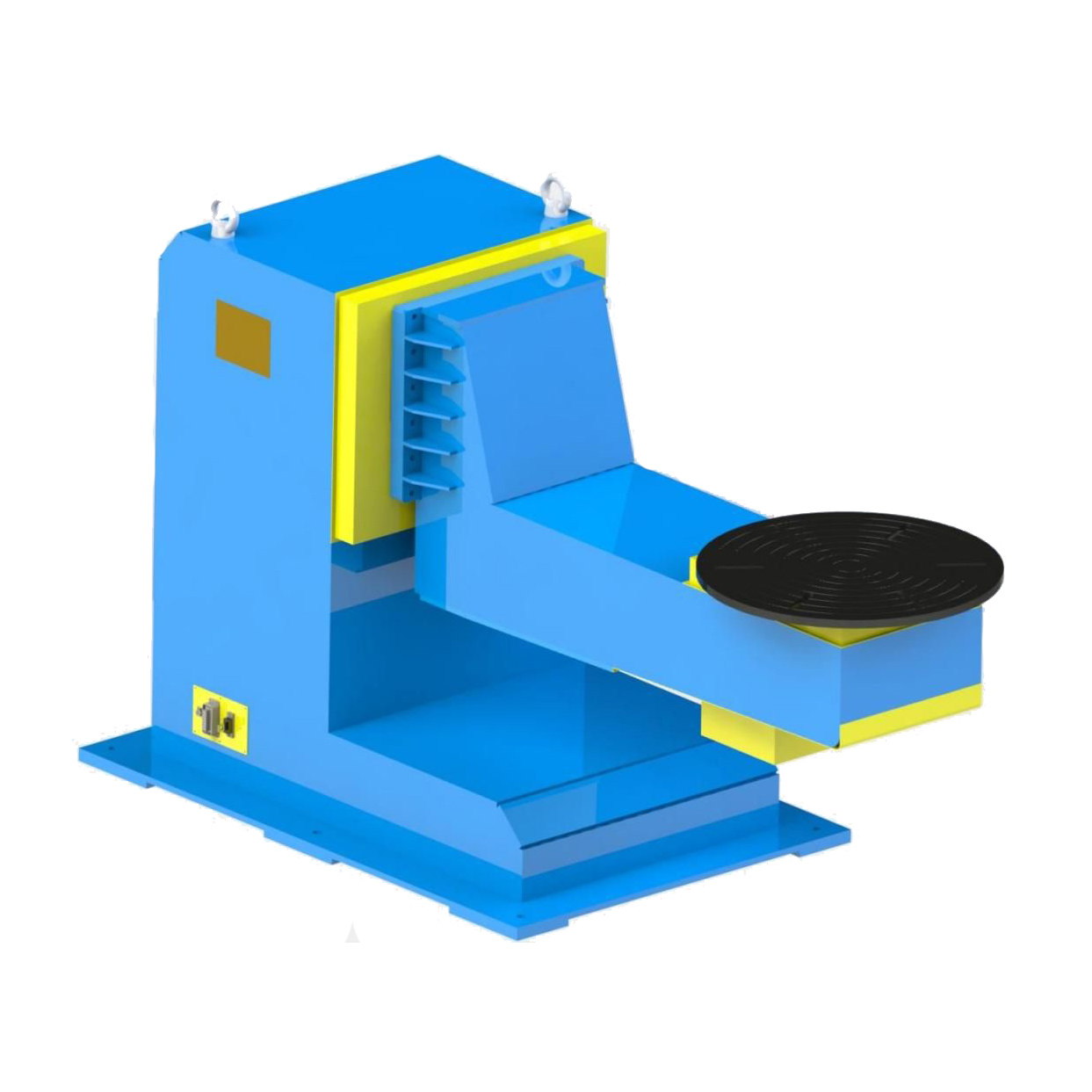
C-ტიპის ორღერძიანი სერვოპოზიციონერი
L-ტიპის ორღერძიანი სერვოპოზიციონერი

U-ტიპის ორღერძიანი სერვოპოზიციონერი
სტრუქტურის შესავალი
ორღერძიანი სერვოპოზიციონერი ძირითადად შედგება შედუღებული ინტეგრალური ჩარჩოსგან, შედუღებული გადაადგილების ჩარჩოსგან, ცვლადი ცვლადი სერვოძრავისა და RV ზუსტი რედუქტორის, მბრუნავი საყრდენისგან, გამტარი მექანიზმისგან, დამცავი ფარისა და ელექტრო მართვის სისტემისგან. შედუღებული ინტეგრალური ჩარჩო შედუღებულია მაღალი ხარისხის პროფილებით. გახურებისა და დაძაბულობის მოხსნის შემდეგ, იგი უნდა დამუშავდეს პროფესიონალური დამუშავებით, რათა უზრუნველყოფილი იყოს დამუშავების მაღალი სიზუსტე და საკვანძო პოზიციების სიზუსტე. ზედაპირი შესხურებულია ანტიჟანგის შესახედაობის საღებავით, რომელიც ლამაზი და უხვია, ხოლო ფერის მორგება შესაძლებელია მომხმარებლის მოთხოვნების შესაბამისად.
შედუღებული გადაადგილების ჩარჩო უნდა იყოს შედუღებული და ჩამოსხმული მაღალი ხარისხის პროფილირებული ფოლადით და დამუშავებული პროფესიონალური დამუშავებით. ზედაპირი უნდა იყოს დამუშავებული სტანდარტული ხრახნების ხვრელებით მონტაჟის პოზიციონირების ხელსაწყოებით, ასევე უნდა ჩატარდეს შეღებვა, გაშავება და ჟანგის საწინააღმდეგო დამუშავება.
მბრუნავი პლატფორმა პროფესიონალური მექანიკური დამუშავების შემდეგ ირჩევს მაღალი ხარისხის პროფილის ფოლადს, ხოლო ზედაპირი დამუშავებულია სტანდარტული ხრახნიანი ხვრელებით სამონტაჟო პოზიციონირების ხელსაწყოებისთვის, ასევე უნდა ჩატარდეს გაშავებისა და ჟანგის პრევენციული დამუშავება.
ცვლადი ძაბვის სერვოძრავისა და RV რედუქტორის, როგორც ენერგიის მექანიზმის, შერჩევა უზრუნველყოფს ბრუნვის სტაბილურობას, პოზიციონირების სიზუსტეს, ხანგრძლივ გამძლეობას და დაბალი უკმარისობის მაჩვენებელს. გამტარი მექანიზმი დამზადებულია სპილენძისგან, რომელსაც აქვს კარგი გამტარობა. გამტარი ბაზა აღჭურვილია ინტეგრირებული იზოლაციით, რომელსაც შეუძლია ეფექტურად დაიცვას სერვოძრავა, რობოტი და შედუღების ენერგიის წყარო.
ელექტრო მართვის სისტემა იყენებს იაპონურ Omron PLC-ს პოზიციონერის სამართავად, სტაბილური მუშაობით და დაბალი უკმარისობის მაჩვენებლით. ელექტრო კომპონენტები შერჩეულია ცნობილი ბრენდებისგან, როგორც ქვეყნის შიგნით, ასევე მის ფარგლებს გარეთ, ხარისხისა და გამოყენების სტაბილურობის უზრუნველსაყოფად.











