



შტამპის/დაწყობის რობოტი SDCX RMD-300/200/160/120/35/08/110/20/50
ტექნიკური პარამეტრები
| მოდელის ნომერი | თავისუფლების ხარისხი | მართვის რეჟიმი | სასარგებლო დატვირთვა (კგ) | განმეორებითი პოზიციონირების სიზუსტე (მმ) | მოძრაობის დიაპაზონი (°) | მაქსიმალური სიჩქარე (°/წმ) | მაჯის დასაშვები დატვირთვის ინერცია (კგ·მ)2) | წრიული დარტყმა (ციკლი/საათში) | მოძრაობის რადიუსი (მმ) | ადგილობრივი წონა (კგ) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | ცვლადი დენის სერვოძრავა | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | ცვლადი დენის სერვოძრავა | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | ცვლადი დენის სერვოძრავა | 160 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | ცვლადი დენის სერვოძრავა | 120 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560 წელი③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | ცვლადი დენის სერვოძრავა | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 1700 წელი② | 2040 წელი | 660 |
| SDCX-RMD20 | 4 | ცვლადი დენის სერვოძრავა | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0.51 | 1780 წელი① | 1720 წელი | 256 |
| SDCX-RMD08 | 4 | ცვლადი დენის სერვოძრავა | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | 1800 წელი① | 1433 წელი | 180 |
შენიშვნები:
① სატესტო ტრასის სიმაღლეა 150 მმ და სიგანე 1000 მმ, ხოლო ფაქტობრივი ციკლის დროზე გავლენას ახდენს ფაქტობრივი სამუშაო პირობები;
② სატესტო ტრასა 200 მმ სიმაღლისა და 1000 მმ სიგანისაა, ხოლო ფაქტობრივი ციკლის დროზე გავლენას ახდენს ფაქტობრივი სამუშაო პირობები;
③ სატესტო ტრასის სიმაღლე 400 მმ და სიგანე 2000 მმ-ია, ხოლო ფაქტობრივი ციკლის დროზე გავლენას ახდენს ფაქტობრივი სამუშაო პირობები;
მოერიდეთ კონტაქტს აალებადი, ასაფეთქებელი და კოროზიული გაზებისა და სითხეების მიმართ; მოერიდეთ წყლის, ზეთის და მტვრის შესხურებას; მოარიდეთ ელექტრო ხმაურის წყაროებს (პლაზმა).
მოძრაობის დიაპაზონი
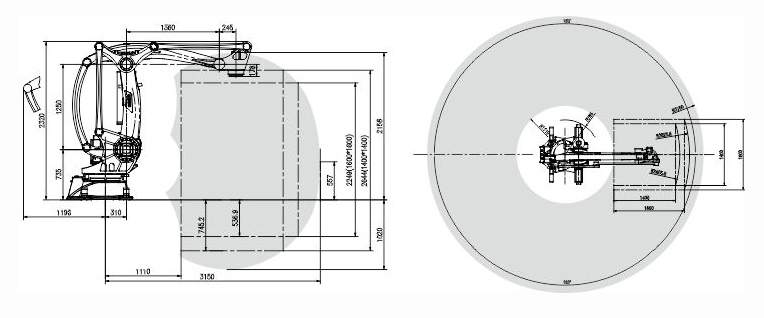
SDCX-RMD300/200/160/120-ის მოძრაობის დიაპაზონის გრაფიკი
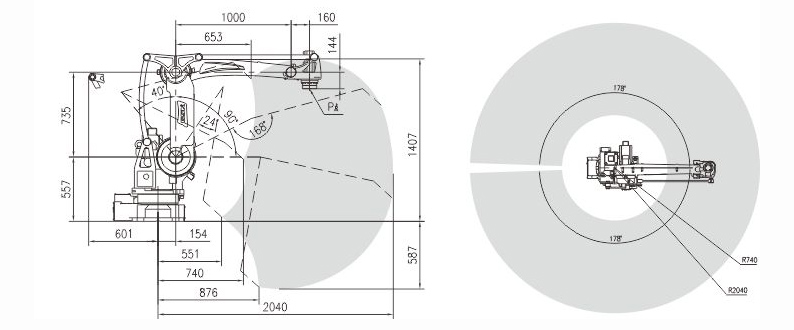
SDCX-RMD20-ის მოძრაობის დიაპაზონის გრაფიკი
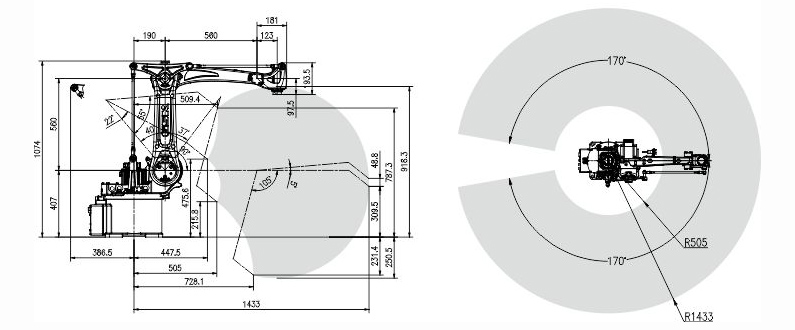
SDCX-RMD08-ის მოძრაობის დიაპაზონის გრაფიკი
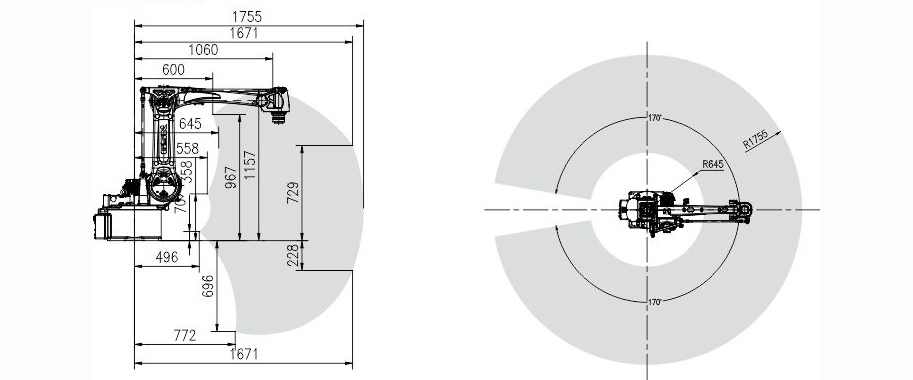
SDCX-RMD50-ის მოძრაობის დიაპაზონის გრაფიკი
პროდუქტის აპლიკაციის ჩვენება
გადაწყვეტილებები
ფოლადის ხვეულების დამუშავების პროექტის ტექნიკური სქემა












