ER სერიის მოქნილი კოოპერატიული რობოტი
ტექნიკური პარამეტრები
| ER3 | ER7 | ER3 პრო | ER7 პრო | |||||
| სპეციფიკაცია | ||||||||
| ჩატვირთვა | 3 კგ | 7 კგ | 3 კგ | 7 კგ | ||||
| სამუშაო რადიუსი | 760 მმ | 850 მმ | 760 მმ | 850 მმ | ||||
| მკვდარი წონა | დაახლოებით 21 კგ | დაახლოებით 27 კგ | დაახლოებით 22 კგ | დაახლოებით 29 კგ | ||||
| თავისუფლების ხარისხი | 6 მბრუნავი სახსარი | 6 მბრუნავი სახსარი | 7 მბრუნავი სახსარი | 7 მბრუნავი სახსარი | ||||
| MTBF | >35000 სთ | >35000 სთ | >35000 სთ | >35000 სთ | ||||
| ელექტრომომარაგება | მუდმივი დენი 48 ვოლტი | მუდმივი დენი 48 ვოლტი | მუდმივი დენი 48 ვოლტი | მუდმივი დენი 48 ვოლტი | ||||
| პროგრამირება | გადათრევის სწავლება და გრაფიკული ინტერფეისი | გადათრევის სწავლება და გრაფიკული ინტერფეისი | გადათრევის სწავლება და გრაფიკული ინტერფეისი | გადათრევის სწავლება და გრაფიკული ინტერფეისი | ||||
| შესრულება | ||||||||
| სიმძლავრე | საშუალო | პიკური მნიშვნელობა | საშუალო | პიკური მნიშვნელობა | საშუალო | პიკური მნიშვნელობა | საშუალო | პიკი |
| მოხმარება | 200 ვატი | 400 ვატი | 500 ვატი | 900 ვატი | 300 ვატი | 500 ვატი | 600 ვატი | 1000 ვატი |
| უსაფრთხოება | > 22 რეგულირებადი უსაფრთხოების ფუნქცია | > 22 რეგულირებადი უსაფრთხოების ფუნქცია | > 22 რეგულირებადი უსაფრთხოების ფუნქცია | > 22 რეგულირებადი უსაფრთხოების ფუნქცია | ||||
| სერტიფიკაცია | შეესაბამება „EN ISO 13849-1, Cat. 3, PL d, EU CE სერტიფიკატი“ სტანდარტს | შეესაბამება „EN ISO 13849-1, Cat. 3, PL d, EU CE სერტიფიკატი“ სტანდარტს | შეესაბამება „EN ISO 13849-1, Cat. 3, PL d, EU CE სერტიფიკატი“ სტანდარტს | შეესაბამება „EN ISO 13849-1, Cat. 3, PL d, EU CE სერტიფიკატი“ სტანდარტს | ||||
| ძალის აღქმა, ხელსაწყოს ფლანგი | ძალა, XyZ | ძალის მომენტი, XyZ | ძალა, xyZ | ძალის მომენტი, XyZ | ძალა, xyZ | ძალის მომენტი, XyZ | ძალა, xyZ | ძალის მომენტი, xyz |
| ძალის გაზომვის გარჩევადობის კოეფიციენტი | 0.1N | 0.02 ნმ | 0.1N | 0.02 ნმ | 0.1N | 0.02 ნმ | 0.1N | 0.02 ნმ |
| ძალის კონტროლის ფარდობითი სიზუსტე | 0.5N | 0.1 ნმ | 0.5N | 0.1 ნმ | 0.5N | 0.1 ნმ | 0.5N | 0.1 ნმ |
| კარტეზიული სიხისტის რეგულირებადი დიაპაზონი | 0~3000 ნმ/მ, 0~300 ნმ/რად. | 0~3000 ნმ/მ, 0~300 ნმ/რად. | 0~3000 ნმ/მ, 0~300 ნმ/რად. | 0~3000 ნმ/მ, 0~300 ნმ/რად. | ||||
| ოპერაციული ტემპერატურის დიაპაზონი | 0~40° ℃ | 0~40° ℃ | 0~40° ℃ | 0~40 ℃ | ||||
| ტენიანობა | 20-80%RH (არაკონდენსირებადი) | 20-80%RH (არაკონდენსირებადი) | 20-80%RH (არაკონდენსირებადი) | 20-80%RH (არაკონდენსირებადი) | ||||
| 180°/წმ | ||||||||
| 180°/წმ | ±0.03 მმ | ±0.03 მმ | ±0.03 მმ | ±0.03 მმ | ||||
| 180°/წმ | სამუშაოს მოცულობა | მაქსიმალური სიჩქარე | სამუშაოს მოცულობა | მაქსიმალური სიჩქარე | სამუშაოს მოცულობა | მაქსიმალური სიჩქარე | სამუშაოს მოცულობა | მაქსიმალური სიჩქარე |
| 180°/წმ | ±170° | 180°/წმ | ±170° |
| ±170° | 180°/წმ | ±170° | 110°/წმ |
| ღერძი 2 | ±120° | 180°/წმ | ±120° |
| ±120° | 180°/წმ | ±120° | 110°/წმ |
| ღერძი 3 | ±120° | 180°/წმ | ±120° | 180°/წმ | ±170° | 180°/წმ | ±170° | 180°/წმ |
| ღერძი 4 | ±170° | 180°/წმ | ±170° | 180°/წმ | ±120° | 180°/წმ | ±120° | 180°/წმ |
| ღერძი 5 | ±120° | 180°/წმ | ±120° | 180°/წმ | ±170° | 180°/წმ | ±170° | 180°/წმ |
| ღერძი 6 | ±360° | 180°/წმ | ±360° | 180°/წმ | ±120° | 180°/წმ | ±120° | 180°/წმ |
| ღერძი 7 | ------ | ------ | ------ | ------ | ±360° | 180°/წმ | ±360° | 180°/წმ |
| მაქსიმალური სიჩქარე ხელსაწყოს ბოლოში | ≤3 მ/წმ | ≤2.5 მ/წმ | ≤3 მ/წმ | ≤2.5 მ/წმ | ||||
| მახასიათებლები | ||||||||
| IP დაცვის ხარისხი | IP54 | IP54 | IP54 | IP54 | ||||
| ISO სუფთა ოთახის კლასი | 5 | 6 | 5 | 6 | ||||
| ხმაური | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ||||
| რობოტის მონტაჟი | ფორმალურად დამონტაჟებული, ინვერსიულად დამონტაჟებული, გვერდზე დამონტაჟებული | ფორმალურად დამონტაჟებული, ინვერსიულად დამონტაჟებული, გვერდზე დამონტაჟებული | ფორმალურად დამონტაჟებული, ინვერსიულად დამონტაჟებული, გვერდზე დამონტაჟებული | ფორმალურად დამონტაჟებული, ინვერსიულად დამონტაჟებული, გვერდზე დამონტაჟებული | ||||
| ზოგადი დანიშნულების შემავალი/გამომავალი პორტი | ციფრული შეყვანა 4 | ციფრული შეყვანა 4 | ციფრული შეყვანა 4 | ციფრული შეყვანა 4 | ||||
|
| ციფრული გამომავალი 4 | ციფრული გამომავალი 4 | ციფრული გამომავალი 4 | ციფრული გამომავალი 4 | ||||
| უსაფრთხოების შემავალი/გამომავალი პორტი | გარე საავარიო გაჩერება 2 | გარე საავარიო გაჩერება 2 | გარე საავარიო გაჩერება 2 | გარე საავარიო გაჩერება 2 | ||||
|
| გარე უსაფრთხოების კარი 2 | გარე უსაფრთხოების კარი 2 | გარე უსაფრთხოების კარი 2 | გარე უსაფრთხოების კარი 2 | ||||
| ხელსაწყოს შემაერთებლის ტიპი | M8 | M8 | M8 | M8 | ||||
| ხელსაწყოს შემავალი/გამომავალი კვების წყარო | 24 ვ/1 ა | 24 ვ/1 ა | 24 ვ/1 ა | 24 ვ/1 ა | ||||
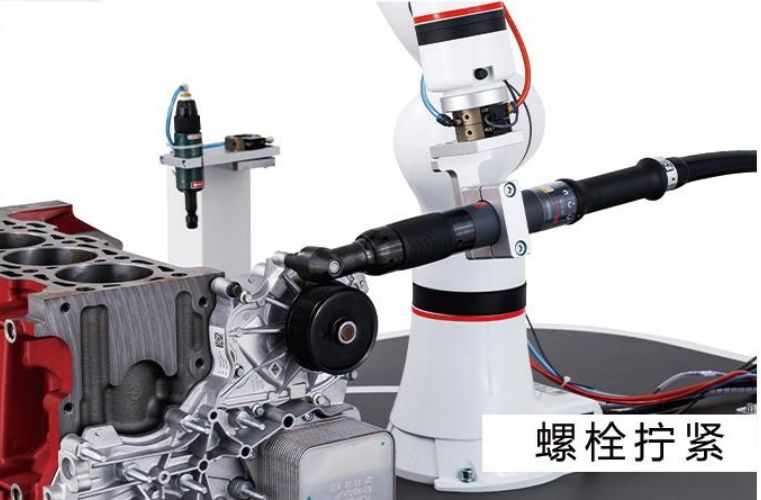
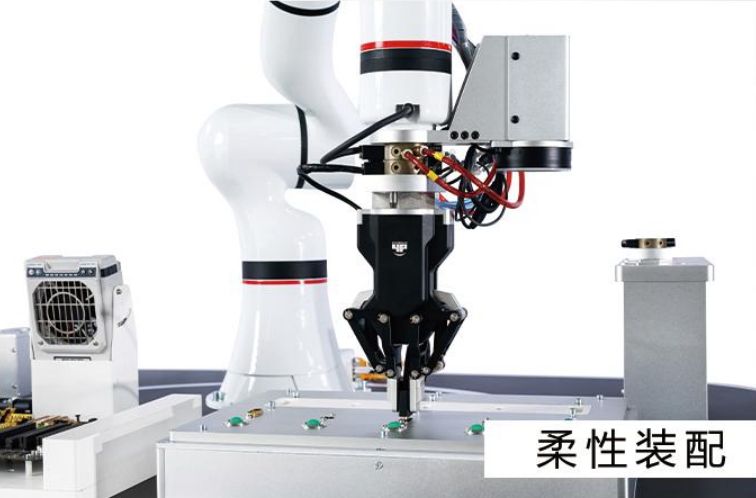
ინდუსტრიული გამოყენება
XMate-ის მოქნილი კოლაბორაციული რობოტები გამოდგება სხვადასხვა პროცესისთვის, მათ შორის მოქნილი აწყობისთვის, ხრახნიანი ჩაკეტვისთვის, ინსპექტირებისა და გაზომვისთვის, ტრანსპორტირებისთვის, მასალებიდან წებოვანი საფარის მოცილებისთვის, აღჭურვილობის მოვლისთვის და ა.შ. მას შეუძლია დაეხმაროს ყველა ზომის საწარმოს პროდუქტიულობის გაუმჯობესებასა და მოქნილი ავტომატიზაციის მიღწევაში.